CAN(-FD) und Modbus Touch-Display
1 Funktion
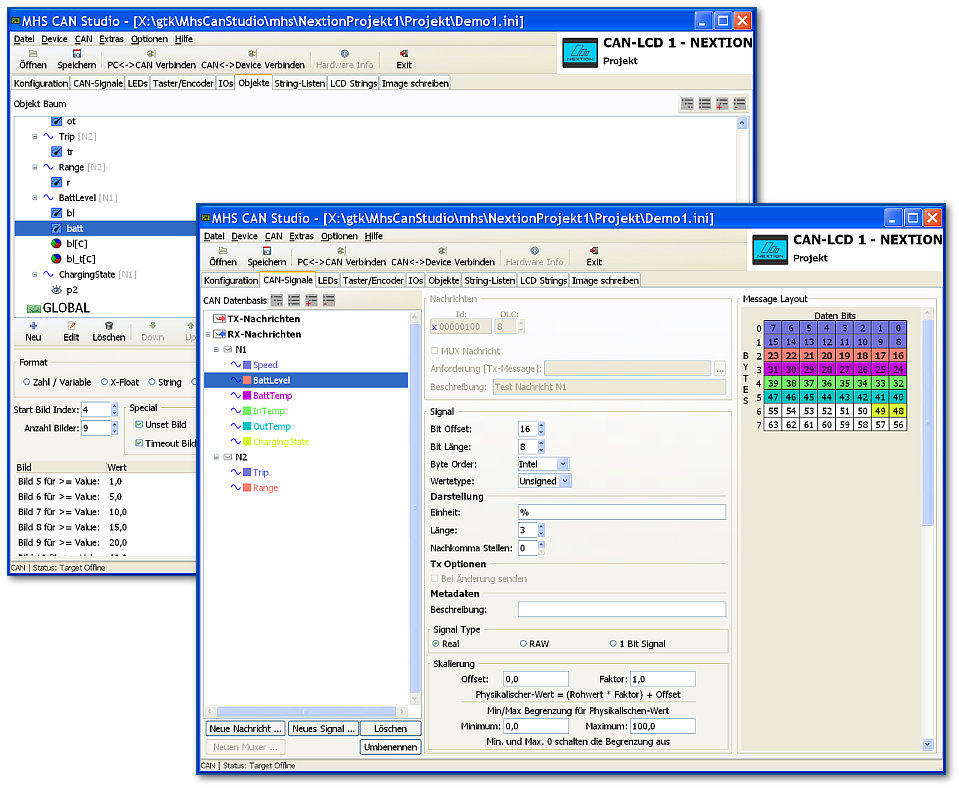
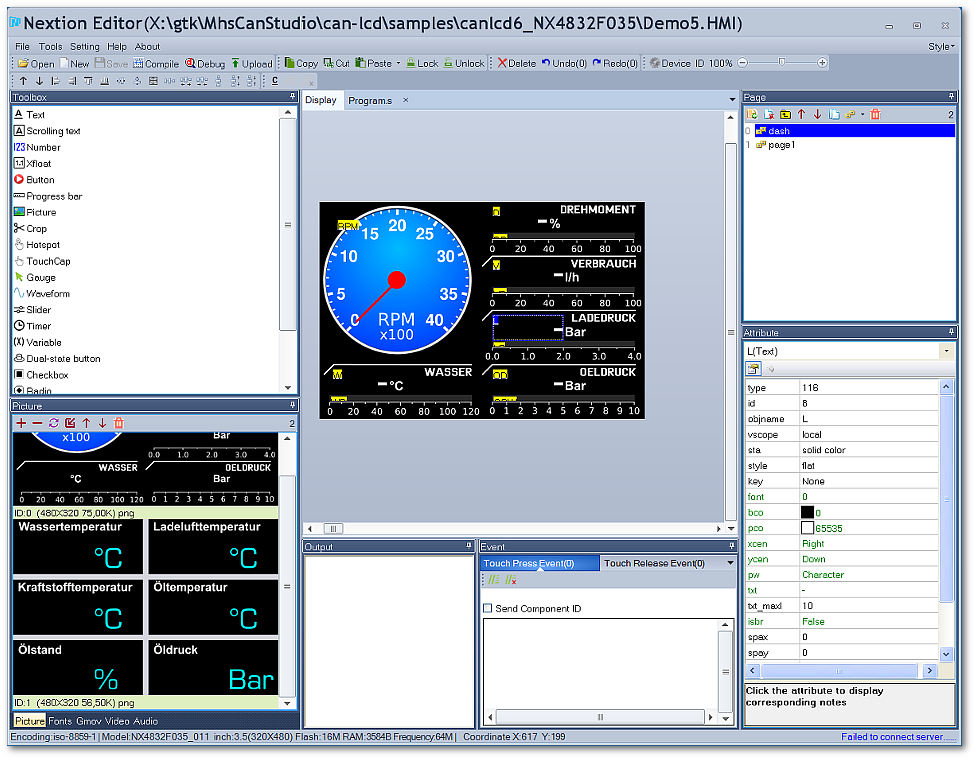
Frei konfigurierbares CAN/CAN-FD HMI Touch-Display. Das CAN-LCD 6 Controller-Board bildet gemeinsam mit einem Nextion-Display eine HMI-Einheit. CAN-Signale lassen sich als Text, Zeiger- oder Balken-Instrument visualisieren. Über Tasten, Drehgeber oder den Touchscreen können CAN-Signale verändert und generiert werden. Diese werden dann ereignis- oder intervallgesteuert als CAN-Nachricht verschickt. Bis zu 254 GUI-Seiten die im Nextion-Editor erstellt wurden, lassen sich in "MHS CAN Studio" importieren, wo die einzelnen Widgets der Seiten mit den entsprechenden CAN-Signalen verknüpft werden. Der Nextion-Editor sowie "MHS CAN Studio" sind kostenlos. Die generierten Image-Dateien (Nextion-Editor & "MHS CAN Studio") werden über den CAN-Bus mithilfe eines Tiny-CANs zur Hardware übertragen.
Anwendungsbeispiele

Features:
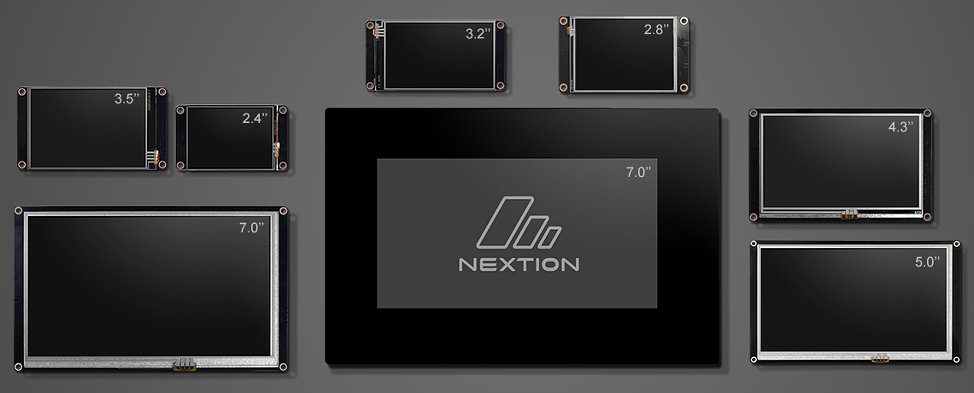
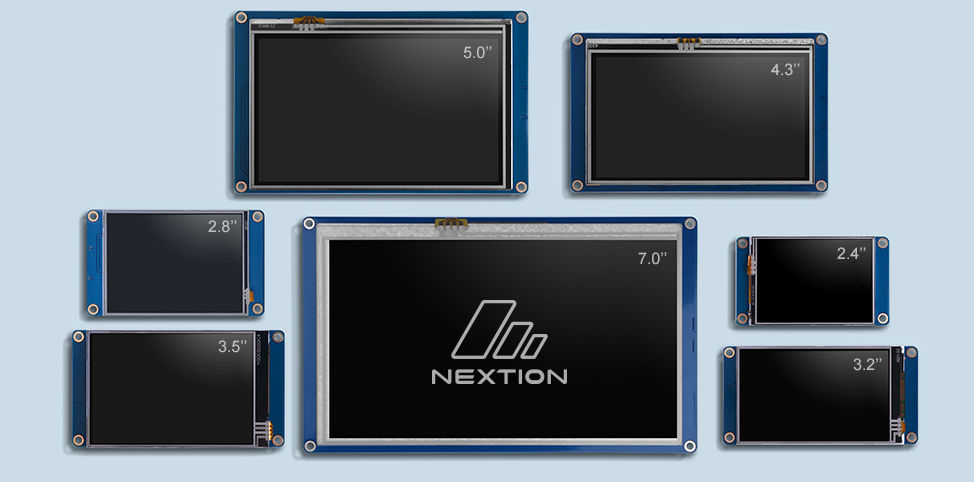
- Variable Displaygrößen von 2,4 bis 10,1 Zoll
- Anzeige von bis zu 254 unterschiedlichen GUI Seiten
- 2 CAN-FD-Schnittstellen
- Power-Down-Mode mit CAN Wake-Up
- Weiter Eingangsspannungsbereich von 9-42 V
- CAN-Signal-Editor mit Unterstützung für Muxer-Nachrichten und DBC-File-Import
- Assistenten für OBD2 und CANopen SDO abfragen
- Datenbanken für MegaSquirt und OBD2
- Hintergrundbeleuchtung mit Tag/Nacht-Modus
- RS485 (Modbus) Schnittstelle
- Akustischer Signalgeber
- 6 Eingänge für Taster und/oder Drehgeber
1.1 Hardware
1.2 Software
Design und Programmierumgebung – MHS CAN Studio
HMI Editor für Nextion Displays – Nextion Editor
1.3 Downloads


1.4 Lieferumfang
- CAN-LCD 6
- Gegebenenfalls Nextion-Display, je nach Variante
- Anschlusskabel für Nextion-Display (20 cm)

 |
Achtung: Das zur Programmierung benötigte "Tiny-CAN"-Interface ist nicht im Lieferumfang enthalten. USB-CAN-Adapter von Drittanbietern werden nicht unterstützt. |
2 Displays
Die Hardware verwendet die Nextion-Displays der Firma ITEAD,
weitere Information finden Sie auf der Website:
https://nextion.tech
Die Software zum Erstellen der HMI-Projekte finden Sie unter:
https://nextion.tech/nextion-editor
2.1 Displays, die mit dem Controller-Board verwendet werde können
Serie: Nextion Intelligent Series Models

| Model | Größe | Auflösung | Touch Panel | CPU | Flash | RAM | Artikelnummer |
| NX4827P043-011R | 4.3” | 480*270 | RTP | 200MHz | 128MB | 512KB | 6920075776478 |
| NX4827P043-011C | 4.3” | 480*270 | CTP | 200MHz | 128MB | 512KB | 6920075776508 |
| NX4827P043-011R-Y | 4.3” | 480*270 | RTP | 200MHz | 128MB | 512KB | 6920075776492 |
| NX4827P043-011C-Y | 4.3” | 480*270 | CTP | 200MHz | 128MB | 512KB | 6920075776515 |
| NX8048P050-011R | 5.0” | 800*480 | RTP | 200MHz | 128MB | 512KB | 6920075776522 |
| NX8048P050-011C | 5.0” | 800*480 | CTP | 200MHz | 128MB | 512KB | 6920075776546 |
| NX8048P050-011R-Y | 5.0” | 800*480 | RTP | 200MHz | 128MB | 512KB | 6920075776539 |
| NX8048P050-011C-Y | 5.0” | 800*480 | CTP | 200MHz | 128MB | 512KB | 6920075776553 |
| NX8048P070-011R | 7.0” | 800*480 | RTP | 200MHz | 128MB | 512KB | IM190402003 |
| NX8048P070-011C | 7.0” | 800*480 | CTP | 200MHz | 128MB | 512KB | IM190402004 |
| NX8048P070-011R-Y | 7.0” | 800*480 | RTP | 200MHz | 128MB | 512KB | IM190402001 |
| NX8048P070-011C-Y | 7.0” | 800*480 | CTP | 200MHz | 128MB | 512KB | IM190402002 |
| NX1060P101-011R-I | 10.1” | 1024*600 | RTP | 200MHz | 128MB | 512KB | IM190411001 |
| NX1060P101-011C-I | 10.1” | 1024*600 | CTP | 200MHz | 128MB | 512KB | IM190411002 |
Serie: Nextion Enhanced Series Models
| Model | Größe | Auflösung | Touch Panel | CPU | Flash | RAM | Artikelnummer |
| NX3224K024 | 2.4” | 320*240 | RTP | 48MHz | 16MB | 3584Byte | IM160511002 |
| NX3224K028 | 2.8” | 320*240 | RTP | 48MHz | 16MB | 3584Byte | IM160511003 |
| NX4024K032 | 3.2” | 400*240 | RTP | 48MHz | 16MB | 3584Byte | IM160511004 |
| NX4832K035 | 3.5” | 480*320 | RTP | 108MHz | 32MB | 8192Byte | IM160511005 |
| NX4827K043 | 4.3” | 480*272 | RTP | 108MHz | 32MB | 8192Byte | IM160511006 |
| NX8048K050 | 5.0” | 800*480 | RTP | 108MHz | 32MB | 8192Byte | IM160511007 |
| NX8048K070 | 7.0” | 800*480 | RTP | 108MHz | 32MB | 8192Byte | IM160511008 |
| NX8048K070-011R | 7.0” | 800*480 | RTP | 108MHz | 32MB | 8192Byte | IM170428001 |
| NX8048K070-011C | 7.0” | 800*480 | CTP | 108MHz | 32MB | 8192Byte | IM170421001 |
Serie: Nextion Discovery Series Models

| Model | Größe | Auflösung | Touch Panel | CPU | Flash | RAM | Artikelnummer |
| NX3224F024 | 2.4” | 320*240 | RTP | 64MHz | 4MB | 3584Byte | 6920075776799 |
| NX3224F028 | 2.8” | 320*240 | RTP | 64MHz | 4MB | 3584Byte | 6920075776805 |
| NX4832F035 | 3.5” | 480*320 | RTP | 64MHz | 16MB | 3584Byte | 6920075776812 |
Serie: Nextion Basic Series Models
| Model | Größe | Auflösung | Touch Panel | CPU | Flash | RAM | Artikelnummer |
| NX3224T024 | 2.4” | 320*240 | RTP | 48MHz | 4MB | 3584Byte | IM150416002 |
| NX3224T028 | 2.8” | 320*240 | RTP | 48MHz | 4MB | 3584Byte | IM150416004 |
| NX4024T032 | 3.2” | 400*240 | RTP | 48MHz | 4MB | 3584Byte | IM150416005 |
| NX4832T035 | 3.5” | 480*320 | RTP | 48MHz | 16MB | 3584Byte | IM150918001 |
| NX4827T043 | 4.3” | 480*272 | RTP | 48MHz | 16MB | 3584Byte | IM150416003 |
| NX8048T050 | 5.0” | 800*480 | RTP | 48MHz | 16MB | 3584Byte | IM150416006 |
| NX8048T070 | 7.0” | 800*480 | RTP | 48MHz | 16MB | 3584Byte | IM150416007 |
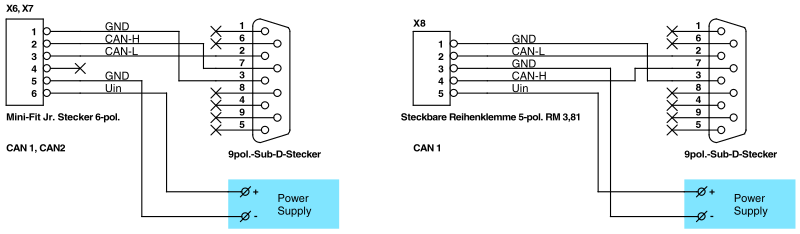
3 Anschlüsse/Verdrahtung
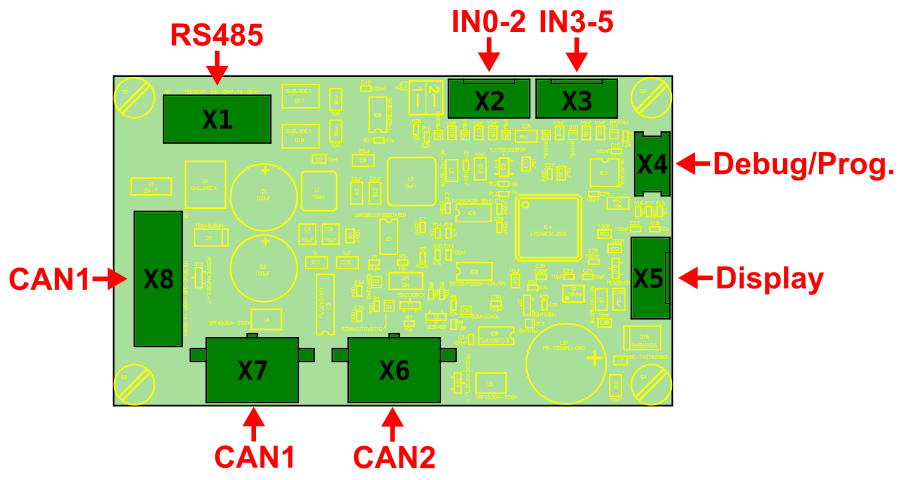
Für den CAN-Bus 1 stehen mit X7 und X8 zwei Anschlussvarianten zur Verfügung.
|
Achtung: Die Baugruppe kann über X1, X6, X7 oder X8 mit Spannung versorgt werden. Die Anschlüsse dürfen nicht zum Durchleiten der Spannungsversorgung benutzt werden. Nur der CAN-Bus 1 ist "Wake-Up" fähig! |
| X1: RS485-Schnittstelle (Modbus) | |||
| Type: XH Stecker 4-pol. RM2,5mm (JST) | Pin | Signal | Beschreibung |
|
1 | RS485- | RS485 (A)- Datenleitung |
| 2 | RS485+ | RS485 (B)+ Datenleitung | |
| 3 | GND | ||
| 4 | V+ | Versorgungsspannung 9 – 42 V | |
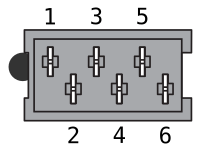
| X2: Eingänge IN0-2 (Taster 0 – 2, Drehgeber 0) | |||
| Type: XH Stecker 4-pol. RM2,5mm (JST) | Pin | Signal | Beschreibung |
|
1 | GND | |
| 2 | IN0 | Taster 0 / Drehgeber 0-A | |
| 3 | IN1 | Taster 1 / Drehgeber 0-B | |
| 4 | IN2 / BOOT2 | Taster 2 / Drehgeber 0-TA | |
| X3: Eingänge IN3-5 (Taster 3 – 5, Drehgeber 1) | |||
| Type: XH Stecker 4-pol. RM2,5mm (JST) | Pin | Signal | Beschreibung |
|
1 | GND | |
| 2 | IN3 | Taster 3 / Drehgeber 1-A | |
| 3 | IN4 | Taster 4 / Drehgeber 1-B | |
| 4 | IN5 | Taster 5 / Drehgeber 1-TA | |
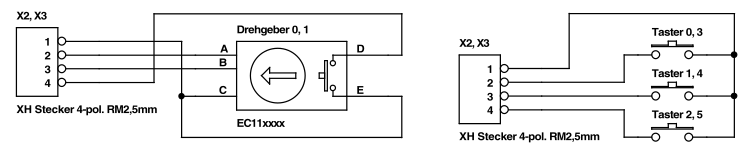
Eingänge IN0 – IN5:
- 2,2k Pull-Up auf 5 V VCC
- Dauer reverse spannungsfest bis 48 V
- ESD geschützt
| X4: Debug/Prog. (Wird nicht benutzt, MHS-Eektronik intern) | |||
| Type: Micro-MaTch 6-pol. (AMP) | Pin | Signal | Beschreibung |
|
1 | SWDCLK | |
| 2 | NC | ||
| 3 | /RESET | Reset, Low aktiv | |
| 4 | SWDIO | ||
| 5 | VCC33 | +3,3 V | |
| 6 | GND | Masse | |
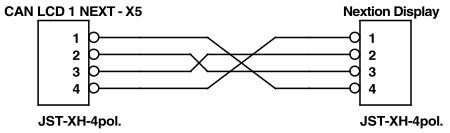
| X5: Nextion-Display | |||||
| Type: XH Stecker 4-pol. RM2,5mm (JST) | Pin | Signal | Beschreibung | ||
|
1 | GND | Masse | ||
| 2 | RXD | Nextion RxD | |||
| 3 | TXD | Nextion TxD | |||
| 4 | VCC | +5V | |||
|
Hinweis: Das Display-Anschlusskabel sollte nicht länger als 20 cm sein. Die Signalübertragung erfolgt als TTL-Pegel und kann sehr leicht gestört werden. Verwenden Sie das mitgelieferte Originalkabel. |
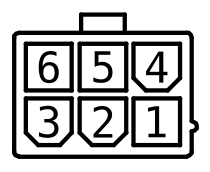
| X6: CAN 2 | |||
| Type: Mini-Fit Jr. Stecker 6-pol. (Molex) | Pin | Signal | Beschreibung |
|
1 | GND | Masse |
| 2 | CAN-H | CAN-Bus Signal High | |
| 3 | CAN-L | CAN-Bus Signal Low | |
| 4 | - | ||
| 5 | GND | Masse | |
| 6 | V+ | Versorgungsspannung 9 – 42 V | |
| Die Verdrahtung entspricht dem CiA-DS102-1 Standard. | |||
| X7: CAN 1 | |||
| Type: Mini-Fit Jr. Stecker 6-pol. (Molex) | Pin | Signal | Beschreibung |
|
1 | GND | Masse |
| 2 | CAN-H | CAN-Bus Signal High | |
| 3 | CAN-L | CAN-Bus Signal Low | |
| 4 | - | ||
| 5 | GND | Masse | |
| 6 | V+ | Versorgungsspannung 9 – 42 V | |
| Die Verdrahtung entspricht dem CiA-DS102-1 Standard. | |||
| X8: CAN 1 | |||
| Type: Steckbare Reihenklemme 5-pol. RM 3,81 | Pin | Signal | Beschreibung |
|
|
GND | Masse | |
| 2 | CAN-L | CAN-Bus Signal Low | |
| 3 | GND | Masse | |
| 4 | CAN-H | CAN-Bus Signal High | |
| 5 | V+ | Versorgungsspannung 9 – 42 V | |
| Die Verdrahtung entspricht dem CiA-DS102-1 Standard. | |||
4 Jumper
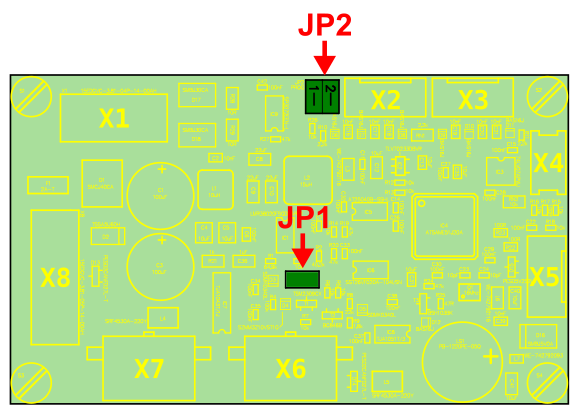
| offen | Power-Down-Funktion freigegeben. Die Hardware muss über den CAN-Bus1 (X7/X8) aufgeweckt werden. |
| geschlossen | Power-Down-Funktion abgeschaltet. Die Hardware wird stets mit Spannung versorgt. |
|
Achtung: Im Auslieferungszustand ist der Jumper JP1 gesteckt, die Power-Down-Funktion ist abgeschaltet. |
JP2: BOOT-Eingänge
| Jumper 1 | BOOT |
| Jumper 2 | BOOT2 |
Weitere Informationen über die Funktion von BOOT/BOOT2 in Kapitel: 5.5 Die BOOT-Eingänge.
5 Programmierung
5.1 Erforderliche Hardware
- Zur Kommunikation mit der Hardware ist ein USB-CAN-Adapter der "Tiny-CAN XL"-Serie erforderlich. Es kann ein Classical-CAN- oder CAN-FD-Adapter verwendet werden.
- DC-Stromquelle 9–43 V/1 A
- CAN-Bus-Verkabelung
5.2 Verdrahtung der Baugruppe zur Programmierung
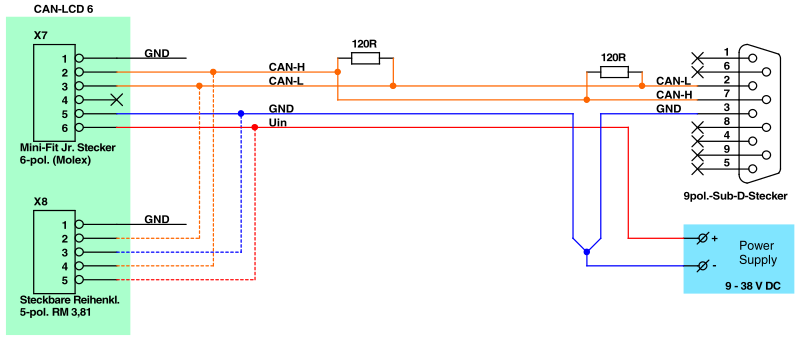
Zur Programmierung steht ausschließlich die CAN-Schnittstelle 1 zur Verfügung. Die Verbindung kann über X7 oder X8 hergestellt werden.
5.3 Installation/Vorbereitung
- Installieren Sie das "Tiny-CAN"-Software-Paket, "TinyCan_xxx.exe" auf dem PC, wählen Sie als Installations-Typ "Vollständig".
- Folgen Sie den Installationsanweisungen.
- Verbinden Sie die "Tiny-CAN"-Hardware mit dem PC.
- Zum Abschluss installiert das Tool "Tiny-CAN Check" den FTDI-Systemtreiber und überprüft die Firmware-Version des USB-CAN-Adapters.
- Installieren Sie den Nextion-Editor von der Nextion-Homepage: https://nextion.tech/nextion-editor
5.4 Die Kommunikation
Die Kommunikation erfolgt nach unten abgebildetem Schema über den CAN-Bus mit dem PC.
Das CAN-LCD 6 Controller-Board verwendet zur Kommunikation mit dem PC 2 CAN Identifier eine Device-ID, auf dem Kommandos vom PC empfangen werden, sowie eine ACK-ID auf dem Antworten an den PC gesendet werden.
Die Konfiguration/Programmierung der Hardware erfolgt mit dem PC-Tool:
"MHS CAN Studio".
Konfiguration der Kommunikationsparameter im Auslieferungszustand (Default Setup):
| Konfiguration | Defaut Werte |
| CAN Konfiguration | Enabled* |
| CAN Übertragungsgeschwindigkeit | 500k Bit/s |
| Frame Format | Standard Identifier |
| CAN Devie ID | 0x7FE |
| CAN ACK ID | 0x7FF |
Alle Übertragungsparameter lassen sich über die PC-Software ändern.
* Es ist auch möglich, die CAN-Konfiguration zu disablen. Die Kommunikation muss dann über die BOOT-Eingänge wieder freigegeben werden.
5.5 Die BOOT-Eingänge
Funktion der BOOT-Eingänge:| BOOT J2-1 | BOOT2 IN2 / J2-2 | |
| offen | offen | Normale Funktion der Hardware. Der Eingang "BOOT2/IN2" wird nur ausgewertet, wenn der Eingang "BOOT" aktiv ist. Beim "Power Up" wird für ca. zwei Sekunden der "BOOT"-Eingang ausgewertet, ist der Eingang in dieser Zeit "aktiv", so startet der Bootloader. |
| geschlossen | offen | Emergency Flash Mode Die "CAN-LCD 6"-Baugruppe startet mit der im EEPROM gespeicherten Konfiguration in den Bootloader. Der CAN-Bus ist jedoch aktiv unabhängig der gespeicherten Konfiguration. |
| geschlossen | geschlossen aktiv, GND | Emergency Boot Mode Die "CAN-LCD 6"-Baugruppe startet mit der Default-Konfiguration in den Bootloader. Diese Verbindung sollte exklusiv ohne andere CAN-Teilnehmer am Bus hergestellt werden. |
Erfolgt im "Emergency Flash Mode/Emergency Boot Mode" innerhalb von 16 Sekunden keine Kommunikation mit dem PC, löst der Bootloader einen Software-Reset aus.
In den beiden "Emergency Modi" muss "MHS CAN Studio" die Kommunikation über den Menüpunkt "Device" -> "Firmware Emergency Download ..." aufbauen. Neben einem Firmware-Update ermöglicht der "Emergency Download"-Dialog auch das Löschen des EEPROMs. Das Default-Setup ist dann wieder aktiv. Ist die Hardware über die Standard- "Verbinden"-Funktion nicht mehr erreichbar, muss das EEPROM gelöscht werden, um wieder ein neues Image programmieren zu können.
6 Montage
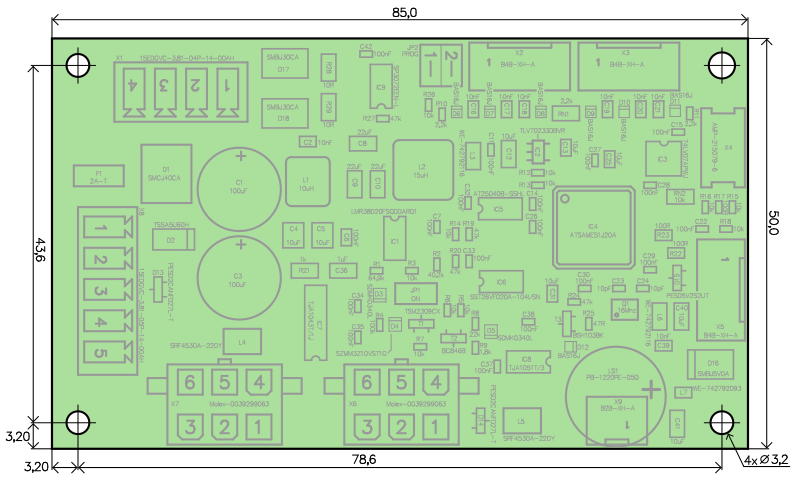
Ansicht von oben
Alle Maßangaben in Millimeter (mm)
Die Leiterplattengröße sowie die Befestigungsbohrungen entsprechen exakt dem 2,8-Zoll-Nextion-Display, Type: NX3224F028. Display und Leiterplatte lassen sich über Distanzabstandshalter direkt miteinander verschrauben.
7 Technische Daten
| Betriebsspannung | 9–42 V DC |
| Stromaufnahme | 39 mA @24 V mit 3,5 Zoll Display |
| Ruhestrom (Power-Down Mode) | Nom. 20 µA, max. 50 µA |
| Überspannungsschutz | > 47 V |
| CAN Interface 1 | High Speed CAN FD (ISO 11898-2:2016) Treiber: TJA1043T |
| CAN-Anschluss Interface 1 | X7: Mini-Fit Jr. Stecker 6-pol. (Molex) X8: Steckbare Reihenklemme RM 3,81, 5-pol. Belegung entsprechend CiA-DS102-1 |
| CAN Interface 2 | High Speed CAN FD (ISO 11898-2:2016) Treiber: TJA1051T/3 |
| CAN-Anschluss Interface 2 | X6: Mini-Fit Jr. Stecker 6-pol. (Molex) Belegung entsprechend CiA-DS102-1 |
| Übertragungsraten | 40 kBit/s – 1 MBit/s (FD: Max. 5 MBit/s) |
| Benutzerdefinierte CAN-Übertragungsraten möglich | Ja |
| CAN-Spezifikation | 2.0A (11-Bit ID) und 2.0B (29-Bit ID) Classical CAN und CAN-FD |
| RS485-Schnittstelle |
|
| Display |
|
| Tag/Nacht-Modus | Ja |
| Digital-Eingänge IN 0 – 5 |
|
| Drehgeber | 2* |
| Taster | 6* |
| Watchdog Überwachung des Prozessors | Software Watchdog |
| Prozessor | ARM CORTEX M4F, Microchip ATSAME51J20A (32-Bit/96MHz, 1024 kB Flash, 265 kB RAM) |
| Temperaturbereich | -20 – +70 °C |
| Abmessungen | 85 x 50 x 25 mm |
| Gewicht (ohne Nextion Display) | 35 g |
| Prüfzeichen | CE |
* = Eingänge können wahlweise belegt werden, ein Drehgeber benötigt drei Eingänge, es können maximal zwei Drehgeber angeschlossen werden.